
הנדסת תמונה STEVE-6D מדריך למשתמש

1 מבוא
תוכנת STEVE-6D מעריכה את ביצועי ייצוב התמונה של מצלמות דיגיטליות. התמונה הבאה ממחישה אקסampהגדרה לניתוח קצוות מלוכסנים בעלי ניגודיות נמוכה באמצעות טבלת הבדיקה TE261. המצלמה מותקנת על ה-STEVE-6D ולאחר מכן מופעלת בזמן שפונקציית ייצוב התמונה של המצלמה מופעלת ומכבה כדי לצלם תמונות בזמני חשיפה שונים. מכאן, התוכנה מנתחת את רוחב הקצוות של הקצוות המלוכסנים המטושטשים ולאחר מכן מחשבת את ביצועי הייצוב ב-f-stops. תוכנה זו יכולה גם לשלוט ב-iQ-Trigger ובחומרה של STEVE-6D עם מחולל גלי סינוס, צורות גל מותאמות אישית של המשתמש או לחיצת היד המותאמת אישית של CIPA.

STEVE-6D – פתרון סוהר
ממשק משתמש גרפי
תוכנת STEVE-6D מחולקת לשני מודולים עיקריים, האחד לתקשורת לחומרת STEVE-6D והשני לחישוב ביצועי ייצוב תמונה [1].

מודול לבקרת רעידות של STEVE-6D
מודול בקרת רעידות
מודול "בקרת רטט" מגדיר נתוני צורות גל ומנהל את הממשק בין
STEVE-6D וה-iQ-Trigger. "בקרת רטט" מחולק לארבעה חלקים שונים, החלק הראשון [2] עובר בין הכרטיסיות הבאות.
לשונית חיבור
כדי לקבל חיבור עם STEVE-6D, לחץ על כפתור "התחבר" [1], וה-STEVE-6D יפנה אוטומטית לכל ששת הצירים למיקום אפס. לניתוק, לחץ על הכפתור האדום [2] ל-
ימין. העברת סמן העכבר מעל פריט המידע [3] תגלה מידע על הבקר המחובר, כגון מספר סידורי וגרסת קושחה בהסבר הכלי.

לשונית חיבור
כרטיסיית הגדרות מראש
ניתן ליישר בקלות את מערכת המצלמה על ידי הגדרת נקודת הסיבוב, המכונה נקודת הציר [1], ומיקום הבית/אפס המקומי [2]. כל עקומת נתוני צורת גל מתייחסת למיקום זה.
נקודת הציר המוגדרת כברירת מחדל (x=y=z=0) ממוקמת במרכז התחתון של לוחית החיזוק. אתה יכול לשנות את מיקומו למה שהכי מתאים ליישום שלך. למשלampאבל, עם טלפון נייד, הגיוני להגדיר את נקודת הציר למרכז הטלפון מכיוון שזה בדרך כלל מרכז הסיבוב כאשר משתמש אוחז בו. עם זאת, למצלמת SLR כנראה יש מרכז סיבוב שונה בגלל הגיאומטריה השונה מאוד שלה

כרטיסיית הגדרות מראש
לשונית צורת גל סינוס
מחולל גלי סינוס עבור כל ציר יוצר דרך מהירה להגדיר נתוני צורות גל. כדי להגדיר צורת גל חדשה, שנה את ערכי ההיסט לגבי מיקום [2], תדר [3], ampליטוד [4], ו
קיזוז זמן [5]. תיבת הסיבוב "מחזורים" [6] מגדירה באיזו תדירות יש לחזור על הסינוס. כדי לבצע את צורת הגל, לחץ על כפתור "הזז". לחץ על הלחצן בפינה הימנית התחתונה [7].
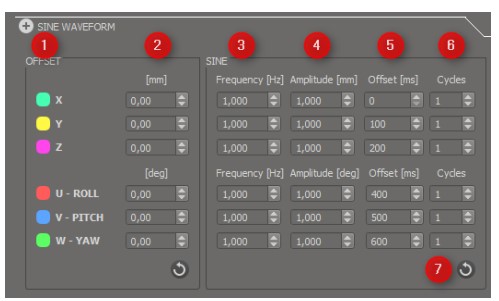
לשונית צורת גל סינוס
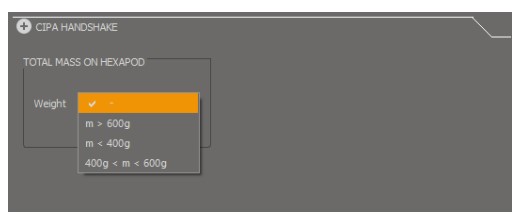
לשונית לחיצת יד של CIPA
כדי לבצע כל אחת משלוש לחיצות היד של CIPA, ראשית, בחר את משקל המערכת האופטית. משם, נתוני צורת הגל מועלים אוטומטית לבקר STEVE-6D, והתנועה מתחילה
כאשר לוחצים על הלחצן MOVE. בשל הסכם הסודיות של CIPA, ה-"WAVEFORM PLOT" הוא רק אקסample
Cלשונית לחיצת יד של IPA
כרטיסיית צורת גל מותאמת אישית
לפי צורת גל סטנדרטית
העלה צורת גל מותאמת אישית ל-STEVE-6D על ידי יצירת טקסט פשוט file עם קואורדינטות קרטזיות. יש להפריד את כל הערכים באמצעות עצירת טאב. רצף הציר הוא XYZUV W. הגדר את ה-sampקצב ling של צורת הגל בתוכנת STEVE-6D ולאחר מכן טען את ה-.txt file לתוכנה. כל הקואורדינטות הן ללא קשר לנקודת הציר ומיקום הביות. העלאת צורת הגל מתחילה אוטומטית לאחר ה-.txt file נטען לתוכנת STEVE-6D. File הגדרה לצורת גל סטנדרטית: (השתמש בכרטיסייה כמפריד)

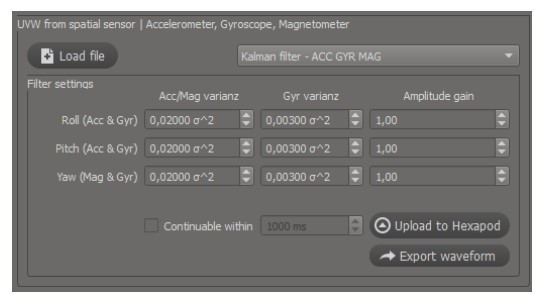
לפי נתונים מרחביים
השתמש בנתוני חיישן מרחביים בעת ניתוח מכשירים כגון סמארטפונים (מד תאוצה, גירוסקופ, מגנומטר). כדי לקבל ערכי סיבוב מדויקים יותר, הגדר את הפרמטר עבור וריאנט Acc/Mag & Gyr.
ה ampרווח ליטוד מיועד רק להגדלת ה ampליטוד. לאחר הגדרת כל הפרמטרים, לחץ על כפתור העלאה ל-hexapod כדי להתחיל בתנועה. תיבת הסימון הרציפה תאפשר למשתמש להגדיר משך זמן להמשך צורת הגל כל עוד מיקום ההתחלה שונה ממיקום הקצה. ישנה גם אפשרות להשתמש רק בנתוני מד התאוצה או הג'ירוסקופ.
ניתן להשתמש בלחצן צורת הגל הייצוא לשמירת צורת הגל ולחישוב ביצועי ה-IS. הנתונים סampקצב ling הוא 1000Hz
הגדרות חיישן מרחבי
File הגדרה עבור UVW מהחיישן המרחבי:
| HH:MM:SS.ZZZZ | AccX[g] | AccY[g] | AccZ[g] | GyrX[rad/s] | GyrX[rad/s] | GyrX[rad/s] | מג[µt] | מג[µt] | מג[µt] |
לשונית טריגר
ניתן לבצע שחרור מצלמה מרחוק עם ה-iQ-Trigger. אפשר להגדיר זמני שחרור מרובים על ידי לחיצה על ה-"WAVEFORM PLOT" או בחירה ידנית של השעה בלשונית iQ-Trigger [3]. אם יש צורך בזמן שחרור אקראי, הגדר את ספירת השחרורים לכל צורת גל [2]. כל שחרור iQ-Trigger מוגדר על ידי השהיית הצילום, משך השחרור וזמן הדלתא בין שני שחרורים של המצלמה [1].

קווים אנכיים מציינים את זמני השחרור של Digitus
שלח לחומרה, סטטוס וספירת תמונות/צורת גל
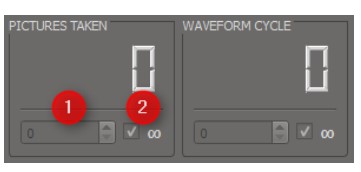
כל המידע על מצב החיבור או השגיאות מוצג באזור "STATUS". כדי להתחיל תנועה, לחץ על כפתור "הזז". על ידי לחיצה על כפתור "מיקום ביתי", ה-STEVE-6D עובר ישירות לעמדת הביות, אשר נקבעה קודם לכן בלשונית "הגדרות מראש". אם יש צורך לכייל מחדש את ה-STEVE-6D, לחץ על כפתור "הפניה לפלטפורמה". כאשר מגדירים ערך עבור "PICTURE TAKEN" או "WAVEFORM CYCLE", ניתן לעצור את התנועה של STEVE-6D באופן אוטומטי. הגדר את הערך ללא הגבלה [2] או בחר ערך עבור מספר הספירות [1] שה-iQ-Trigger צריך להפעיל, או שצורת הגל צריכה להפעיל.
ניתוח נתונים
מודול "נתח נתונים" עושה את חישוב ייצוב התמונה. מודול זה כולל שלושה חלקים משמעותיים. החלק הראשון הוא "כלי המטא נתונים" [1], אשר מגדיר את המטא נתונים של המצלמה. השני
החלק הוא עיבוד אצווה תמונה עבור חישוב IS-Performance [2]. החלק האחרון מציג את תוצאות התמונות שצולמו.
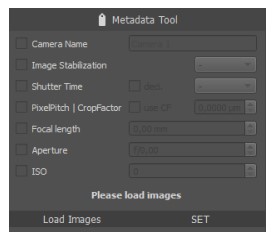
מטא נתונים
חיוני לקבל מידע מטא נתונים של המצלמה לחישובי IS-Performance כגון גובה הפיקסלים וזמן התריס. אם המצלמה לא מתעדת מידע זה בתמונה file, טען אצווה של תמונות וכתוב אותה באופן ידני לתמונת jpg. טען את התמונות, הגדר את הפרמטרים ולאחר מכן לחץ על כפתור "SET".
רק לתמונות JPEG
טען תמונות לחישוב IS-Performance
לאחר טעינת סדרת העזר, בחר סדרת בדיקה עבור IS-ON. נדרשת לפחות סדרת תמונות אחת עבור ISOFF. אם נעשה שימוש בצורת גל לחיצת היד של CIPA, אין צורך בסדרת הבדיקות של IS-OFF.
במקום זאת, לחץ על הלחצן עבור CIPA ולאחר מכן בחר את משקל המצלמה. ניתן לטעון תמונות ממדידות צורות גל מותאמות אישית על ידי לחיצה על לחצן נתוני תנועה מותאמים אישית. מרכז "נתח תמונה
רק" תיבת הסימון זמינה לנתונים מהירים יותר אך פחות מדויקים. בעת בחירה באפשרות זו, רק תיבת הקצה האמצעית משמשת במהלך החישוב.

לאחר בחירת האפשרויות, עץ view מהסדרות השונות יופיעו, כפי שניתן לראות להלן. אם אין מטא נתונים זמינים של תמונה, השתמש ב"כלי המטא נתונים", שמצוין בהודעת שגיאה
לאחר טעינת התמונות לתוכנת STEVE-6D. לאחר השלמתו, ניתן להתחיל את חישוב ביצועי ייצוב התמונה על ידי לחיצה על כפתור "תהליך". תוצאה file עם חישובי רוחב קצה בודד יישמרו בתיקייה עם התמונות.
| זמן חשיפה [ים] | גובה [פיקס] | יאוו [פיקס] | Sqrt(p^2+y^2) |
IS-ביצועים
רוחב הקצה מחשב את ה-IS-Performance במיקרומטר לעומת זמן החשיפה. רוחב הקצוות של סדרת ISON ו-IS-OFF (או נתוני תנועה) מומרים לגודל של גלויה עם viewמרחק של 65-80 ס"מ כדי לבצע תהליך זה. ביצועי ייצוב התמונה ב-f-stops [2] ממוקמים על ידי נקודות החיתוך של עקומת IS-ON ו-IS-OFF עם גבול קביעה של 63μm [1]. הערך המספרי של IS-Performance מוצג ב-f-stops.

בחירת נתוני תוצאה
כדי לבחור תוצאות בודדות של חישוב IS-Performance, הזז את אחד המחוונים [1] עבור "SERIES",
"זמן חשיפה", "תמונה" או "החזר ROI" (אזור עניין). מהלך זה ישנה את המוצג
תוצאות עבור פונקציית פיזור הקצה ("ESF") [3], תגובת תדר מרחבית ("SFR") [4], וה-
כרטיסיית "כניסת תמונה" [5]. ניתן להציג או להסתיר מידע מפורט באמצעות לחצן "INFO" [6].

פונקציית פיזור קצה (ESF)
ה-ESF מחשב כל רוחב קצה. לפיכך, מעברampקצה נטו של led של תמונה החזר ROI מחושב מכל תמונה. כל תמונה כוללת עשרים קצוות מלוכסנים, כולל עשרה במגרש ו
עשר לכיוון הפיתול.
תגובת תדר מרחבית (SFR)
ה-SFR אינו משמש לחישוב IS-Performance. במקום זאת, הוא מתאר את פונקציית העברת האפנון של כל ROI.
בחירת תמונה ו-ROI
ניתן לשנות או להציג את אזור העניין עבור כל תוצאה. לחץ על כפתור "ערוך החזר ROI" ושנה את מיקום ההחזר. כדי להגדיר ROI חדש, לחץ על הלחצן והשתמש בלחצן "-" כדי למחוק החזר ROI. לקבלת אפקט התקרבות, לחץ על כפתור "זום +" וצייר מלבן על התמונה.
טיפול בשגיאות
אם התוכנה לא מזהה את כל 20 החזר ה-ROI באחת התמונות, אירעה שגיאה במהלך רשימת התמונות הקלט view. אם זה קורה, אנא בחר את התמונה והגדר ידנית את החזר ה-ROI החסר עבור התמונה.
Cזכויות יוצרים Iמידע
על ידי התקנת תוכנה זו, אתה מסכים ומסכים להיות מחויב לתנאי הסכם רישיון התוכנה המופיעים להלן.
זכויות יוצרים © Image Engineering GmbH & Co. KG, 2021
התוכנה המסופקת במסגרת הסכם זה מסופקת על בסיס "כמות שהיא", ללא כל אחריות או מצג מפורש או משתמע, לרבות, אך לא רק, כל אחריות משתמעת של סחירות או התאמה למטרה מסוימת. באחריות הצרכן בלבד לקבוע את התאמת התוכנה למטרה מסוימת או לשימוש מסוים. Image Engineering GmbH & Co.
KG וכל מי שהיה מעורב ביצירה, ייצור, אספקה או תמיכה של תוכנה זו, בשום מקרה לא יהיו אחראים לנזקים ישירים, עקיפים, מיוחדים, תוצאתיים או מקריים הנובעים מכל פגם, טעות או השמטה. בתקליטון או בתוכנה או מכל אירוע אחר, לרבות, אך לא רק, כל הפסקת שירות, אובדן רווחים או מוניטין, צעדים משפטיים או כל נזק תוצאתי אחר. המשתמש נוטל על עצמו את כל האחריות הנובעת משימוש בתוכנה זו, אשר ל-Image Engineering GmbH & Co. KG לא תישא באחריות, ללא קשר לשאלה אם שימוש כזה הוא חוקי או צפוי. Image Engineering GmbH & Co. KG לא תישא באחריות לנתונים או לתוכניות כלשהן המאוחסנות או בשימוש עם תוכנה זו, לרבות העלויות של שחזור נתונים או תוכניות כאלה. Image Engineering GmbH & Co. KG שומרת לעצמה את הזכות לבצע תיקונים או שיפורים במידע המסופק ובתוכנה הקשורה בכל עת, ללא הודעה מוקדמת.
קרא עוד על מדריך זה והורד PDF:
מסמכים / משאבים
 | סטיב-6D |
הפניות
- הנדסת תמונה - פתרונות לבדיקת איכות תמונהwww.image-engineering.com
- מדריך למשתמשmanual.tools